AUV Sentry on NA165: Troubleshooting Software at Sea

This blog was written by OET’s Outreach and Media Coordinator and NA165 Communications Lead Jamie Zaccaria.
“We put it in the water, and we let it go. At that point, it’s on Sentry,” says Christopher Thierauf, Research Engineer with Woods Hole Oceanographic Institution (WHOI). But in reality, it’s also on the engineering team that assembled the vehicle and the team that programmed the software running AUV Sentry. They have to trust that their work before launch was good enough to prepare the vehicle for its underwater mission.
During the NA165 E Mamana Ou Gataifale II expedition, the Corps of Exploration onboard E/V Nautilus includes WHOI team members using the autonomous underwater vehicle (AUV) Sentry. The WHOI vehicle (operated by the National Deep Submergence Facility and funded by the National Science Foundation) produces bathymetric, sidescan, subbottom, and magnetic maps of the seafloor. Rated to 6,000 meters (over 19,500 ft), it also collects environmental data along its track and is capable of taking digital bottom photographs in a variety of deep-sea terrains such as mid-ocean ridges, deep-sea vents, and cold seeps at ocean margins.
Troubleshooting Sentry at sea is different than at home, Thierauf tells me. There’s an increased time pressure and fewer resources. “We have to bring all of our own software packages and data sets in advance to be sure we have them if we need them. A lot of the problems we run into are so unique, so you can’t really Google them anyway,” he says.
Thierauf has been working with Sentry for about a year now, and this is his third cruise with the vehicle. Overall, he spends a third of his time at sea supporting scientists by configuring and deploying Sentry to meet their objectives (which usually involve collecting bathymetry and sensor data).

Christopher Thierauf is a Research Engineer with Woods Hole Oceanographic Institution (WHOI).
“The software for Sentry has already been written, so we have a working system that can provide mission parameters for execution,” he continues. “But we need to make sure that it’s working during missions. Between each deployment, we may need to reconfigure to deal with multiple objectives.”
Equipment failures due to the intense environment of the deep ocean sometimes require the team to “debug” the system and swap out different components—from sensors to motors. To make it even more complicated, each component needs to be individually integrated with Sentry’s software.
During the NA165 expedition, Thierauf is part of the WHOI Sentry team led by Sentry Program Manager Sean Kelley and including mechanical engineers Justin Fuji and Renée Gruner-Mitchell. WHOI research engineer Allisa Dalpe is the other software expert onboard. Dalpe is also acutely familiar with the intricacies of working with Sentry at sea.
“Troubleshooting is really an experience thing. Once you see enough problems, you end up finding the best first steps to get you through them. It’s not something you can get from a book,” Dalpe says.
This is Dalpe’s fourth cruise with Sentry. A software engineer, she helps with pre- and post-dive checks, data processing, vehicle launch and recovery, and any other troubleshooting that comes with the territory. After vehicle recovery, she oversees a process using data visualization tools that take information from Sentry and produce analyzable plots for both science and engineering goals.

WHOI research engineer Allisa Dalpe is also acutely familiar with the intricacies of working with Sentry at sea.
During this expedition, Sentry is diving really deep (over 5,000 meters), making it more challenging. If something goes wrong, the team needs to determine what caused the problem and how to fix it, all without having direct contact with the autonomous vehicle. That deep, pressure becomes a serious barrier, especially to mechanical factors. Acoustic communications also degrade the deeper you dive, presenting yet another issue. Dalpe describes a recent Sentry dive that needed troubleshooting,
“We knew where the vehicle was, but we weren't receiving our SMS (text message) updates, which we concluded to be due to how deep we were diving. It was taking a lot longer than we expected. But, once we updated those USBL configuration parameters to better fit our scenario, we were able to avoid those issues on the next dives.”
Dalpe first sailed on Nautilus as an ROV Engineering Intern in 2019, coincidently, during a trip to American Samoa. It’s a full-circle moment for her as she reflects, “That really provided the first hands-on experience with a large-scale vehicle for me. I learned so much in those three weeks, and it confirmed that I was on the right track and wanted to continue working with underwater vehicles.”
While onshore, Dalpe’s work also includes separate projects integrating remote operations into Sentry. She’s specifically looking into the potential for shoreside support, including watchstanding, troubleshooting, and predive procedures.
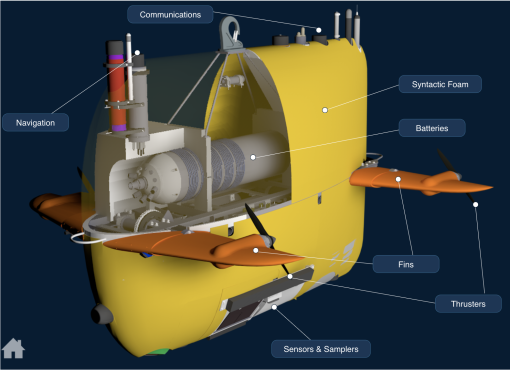
AUV Sentry was designed to conduct seafloor surveys at low altitudes and in rough or complex topography.
Wondering what Thierauf is up to when not at sea?
“Back at Woods Hole, I can do my own research to advance Sentry and make it more capable for open world autonomy,” he says. “One of the unique things about this platform is we have limited supervision so our ability to understand or predict what it’s doing is limited by acoustic communication from the sea. We need to make sure whatever behavior we provide is robust and repeatable and able to work without us constantly watching.”
AUV Sentry differs from ROV Hercules in that it is fully autonomous. Being remotely operated, Hercules is attached by a tether to E/V Nautilus at all times and controlled constantly by pilots onboard. As an AUV, Sentry is much more independent.
“This is a unique situation because as an open world system, we can’t control the environment it goes into nor can we watch in real-time like with Hercules,” says Thierauf. “You have to be able to debug with limited information from tiny acoustic packets. People may have run into these bugs before but these problems themselves are unique to Sentry in this environment. It’s definitely super interesting to me and I enjoy the challenge.”
Sentry can be used as a stand-alone vehicle or, as is the case with this expedition, alongside a remotely operated vehicle like ROV Hercules to scout regions ahead of dives by those vehicles to increase the efficiency of deep-submergence investigations.
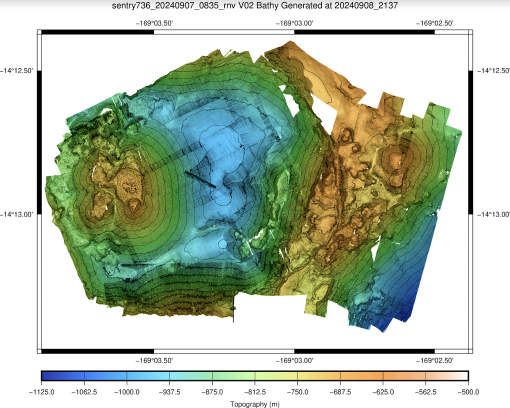
Preliminary map of Vailulu'u Seamount produced by Woods Hole Oceanographic Institution (WHOI)’s AUV Sentry during the NA165 E Mamana Ou Gataifale II expedition.
“In the field robotics space, there’s a concept of ‘dull, dirty, and dangerous’ referring to the things we want fully autonomous robots to do. The task of having Sentry drive back and forth for many hours is not interesting to an ROV pilot, but the data that it collects is incredibly valuable,” says Thierauf. “Being able to go down to these extreme environments and operate for long periods of time is then valuable for informing other missions like those of Hercules by providing specific targets for investigation.”
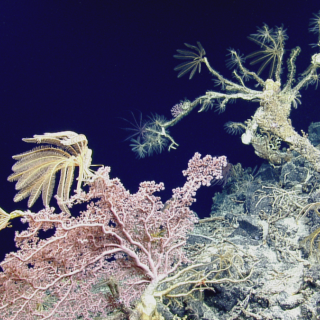
An example of this dual-vehicle work is our exploration of Vailuluʻu Seamount: the only active underwater volcano within the National Marine Sanctuary of American Samoa. After diving on and mapping Vailuluʻu Seamount, the Sentry team created a preliminary map of the area using a high-frequency Kongsberg EM2040 sonar. This 1-meter resolution map reveals more details of the seafloor than maps from years past including individual seafloor eruptions and even hydrothermal vent chimneys. Additional sensors attached to Sentry, including for turbidity and temperature, help us narrow down the location of potential vents, like the ones we later dove on with ROV Hercules.
The NA165 cruise continues efforts from the 18-day E Mamana Ou Gataifale I (NA164) expedition, which mapped within the National Marine Sanctuary of American Samoa and gathered data from the biodiverse mid-water ocean twilight zone using underwater vehicles launched from E/V Nautilus and from shore. Both expeditions will provide important data for interpretations of seafloor biological density and diversity, enhancing mission planning and enhancing our opportunities to survey cultural heritage sites.
The NA165 expedition is funded by NOAA Ocean Exploration, NOAA Office of Marine and Aviation Operations Uncrewed Systems Operations Center, and the Bureau of Ocean Energy Management via the Ocean Exploration Cooperative Institute (OECI) with additional support from Woods Hole Oceanographic Institution (WHOI), Air/Sea Heritage Foundation, and other partners.
E Mamana Ou Gataifale II - American Samoa
American Samoa is the southernmost U.S. territory, centered in the South Pacific, 2,300 miles southwest of Hawaiʻi, and 1,500 miles northeast of New Zealand. It is home to the cradle of Polynesia’s oldest culture.


